Steering Behaviours
A practice project in Unreal Engine to experiment with classic steering behaviours: separation, cohesion, alignment, and obstacle avoidance.
As part of my learning process with Unreal Engine, I developed this project to practice and visualize steering behaviours in a simple yet interactive environment.
Steering behaviours are widely used in games and simulations to give autonomous agents (boids) lifelike motion without predefined paths.
The goal was to experiment with how different behaviours interact when combined, and to provide a way to tune their influence in real time through sliders.
Introduction
Steering behaviours are a classic set of techniques in artificial intelligence for games, especially when dealing with groups of agents (commonly called boids).
They allow autonomous agents to move in a way that feels natural, organic, and responsive, without needing predefined paths or animations.
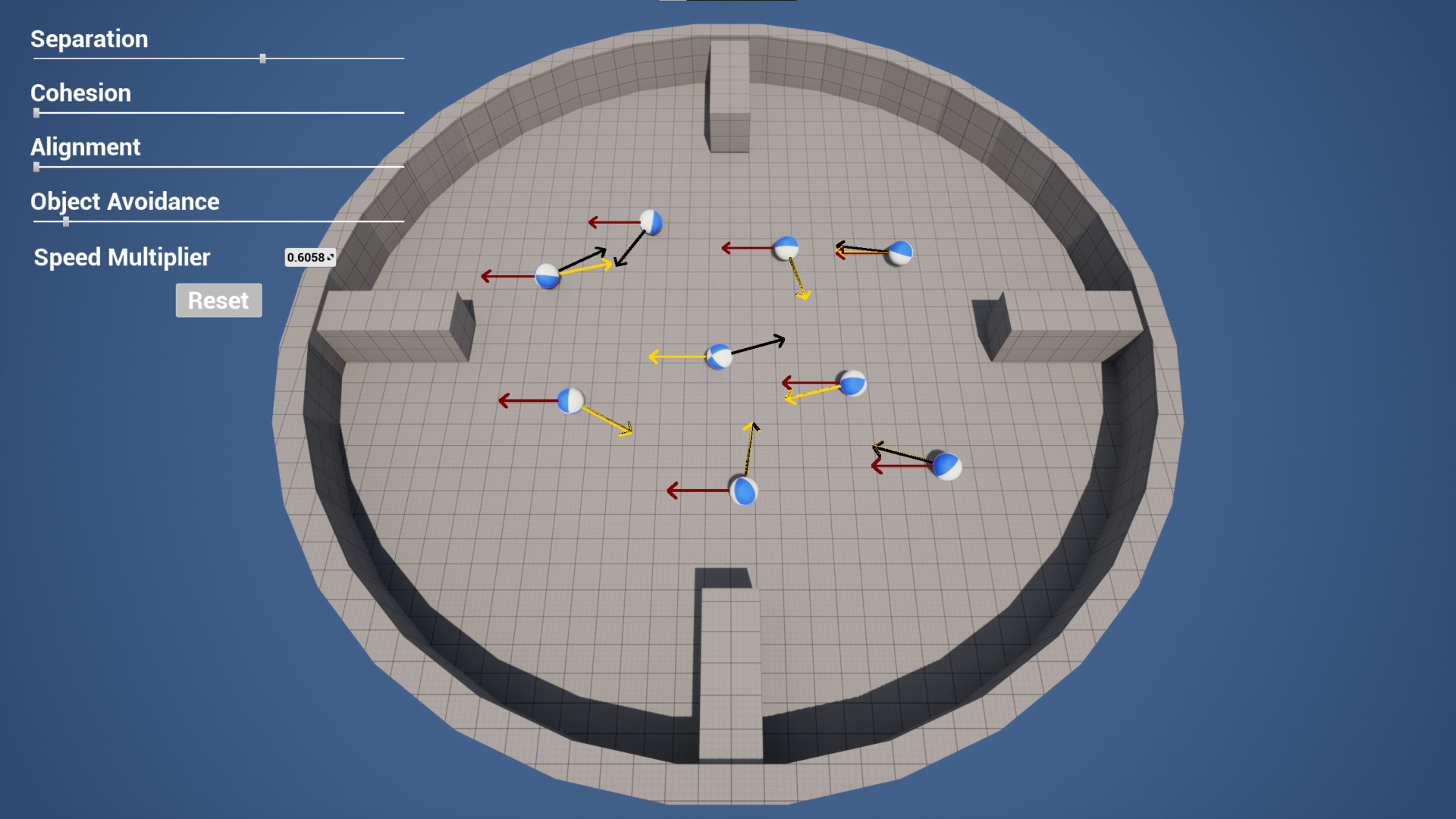
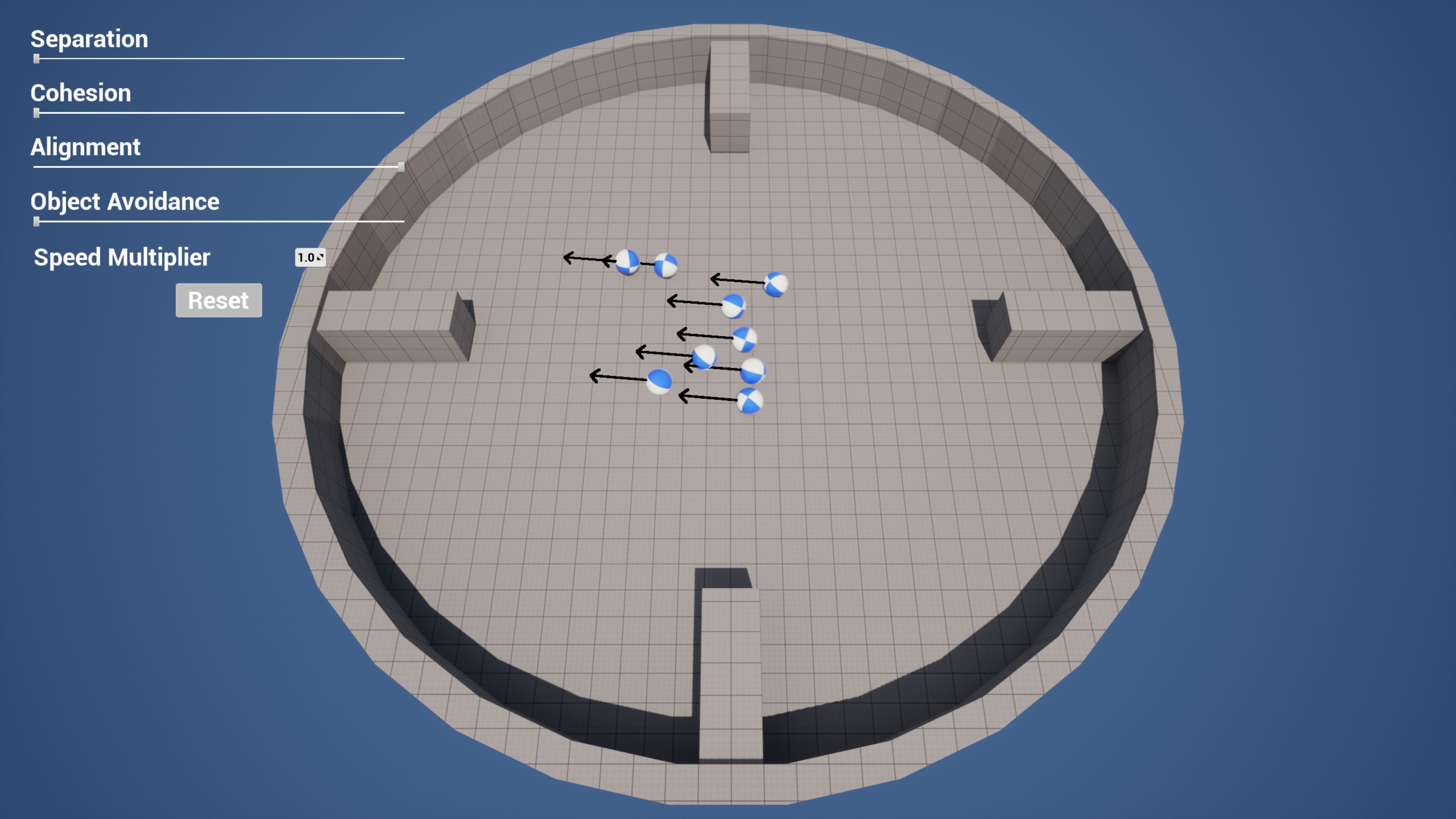
In the demo, you can move sliders to define how much each behaviour (from 0 to 1) affects the movement of the agents (balls).
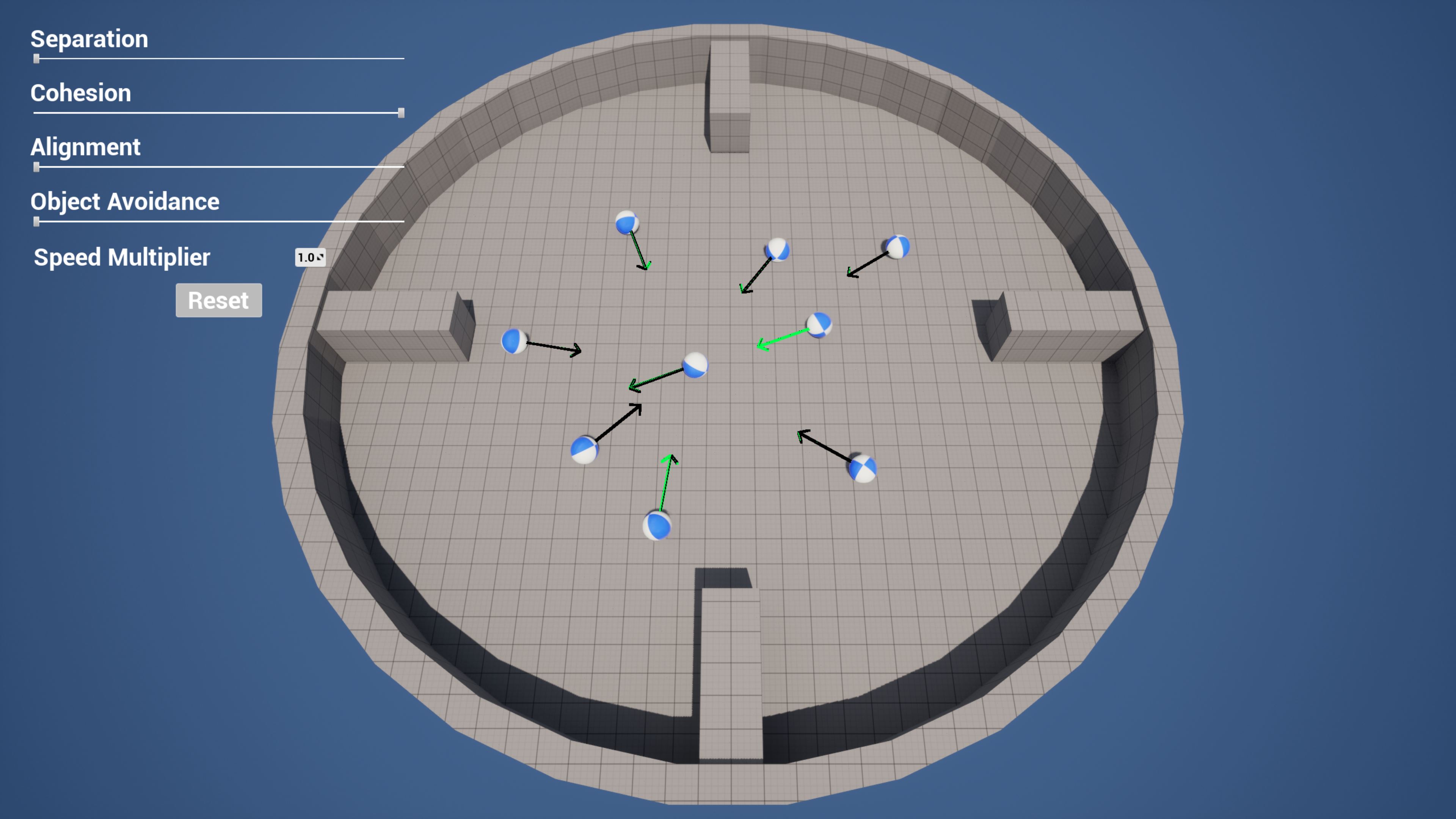
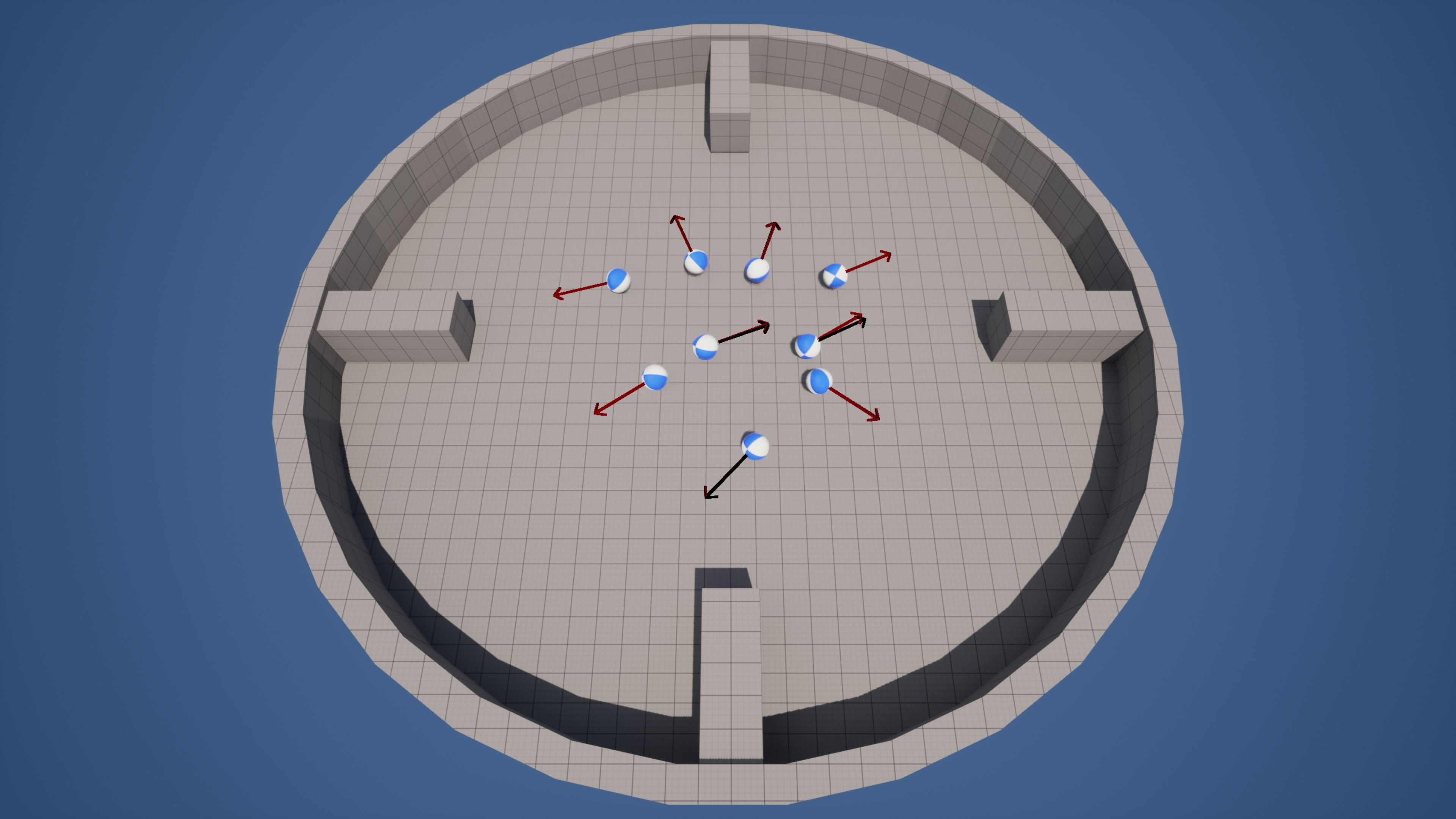
- Black arrow → final resulting movement.
- Red arrow → separation force.
- Green arrow → cohesion force.
- Blue arrow → alignment force.
- Yellow arrow → obstacle avoidance.
Implemented Behaviours in Unreal Engine
All behaviours are calculated every tick in Blueprints and combined into a final movement vector.
- Cohesion (Green): pulls each agent towards the center of its neighbors. In Unreal, this is done by averaging neighbor positions and generating a force in that direction.
- Separation (Red): pushes agents apart to prevent collisions. Implemented by calculating repulsion vectors that grow stronger the closer two agents are.
- Alignment (Blue): aligns each agent with the average heading of its neighbors. In Blueprints, this means weighting neighbors’ velocities and steering towards that combined direction.
- Obstacle Avoidance (Yellow): prevents collisions with objects. A forward Line Trace detects obstacles and applies a repulsion force based on the hit normal.
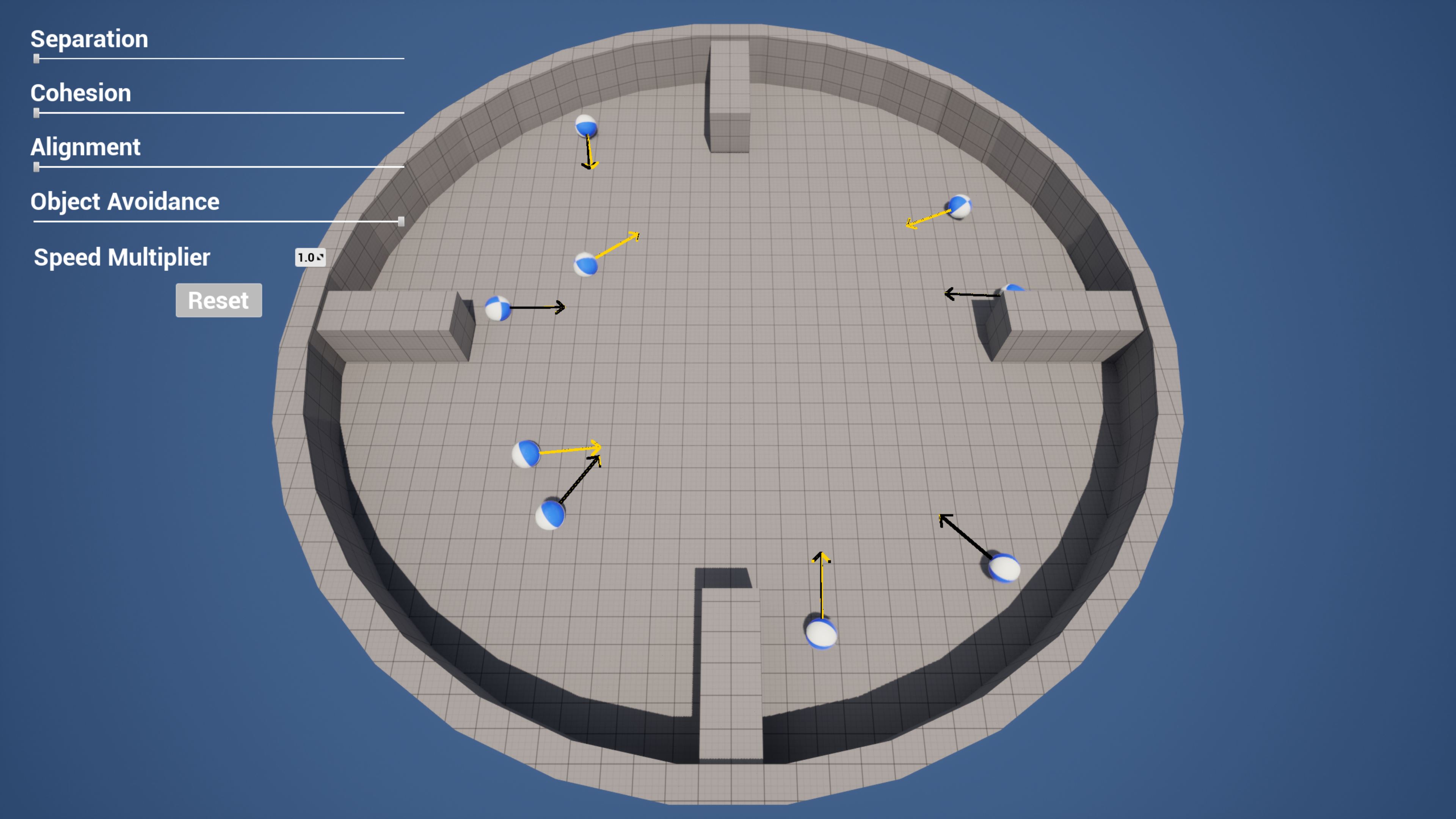
Final Movement (Black)
The four vectors are summed and normalized into a single final direction. This direction is then applied as torque and velocity to the physics component of each agent.
Forces reset each tick, ensuring smooth and dynamic motion that depends only on the current state of the environment.
Conclusion
This project was a great way to practice both vector math and agent-based AI programming.
Even with just four behaviours, the result feels dynamic and lifelike. Real-time tuning with sliders makes the demo an effective tool for learning, testing, and experimenting.